THE SMC_L298N I2C CONNECTION OVERVIEW
When using the smc_l298n pid motor driver with I2C, you’ll not need the FTDI programmer (which is used for serial communication). You first need to power the motor driver via the power port (24v to 6v) and the I2C port be powered by the Arduino-based microcontroller it is connected to.
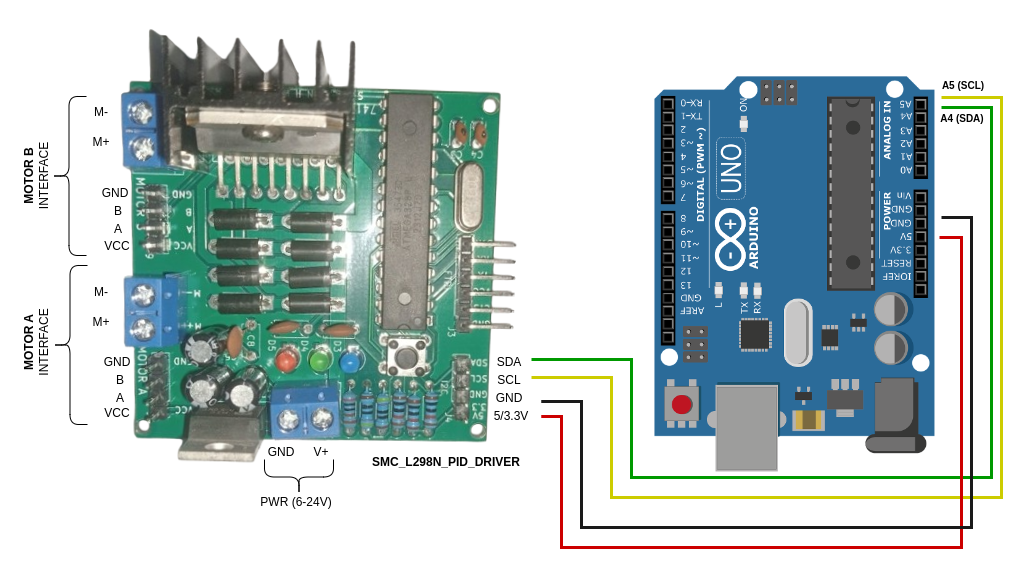
For example, if it is connected to an ESP32 microcontroller, the I2C port will be powered by the ESP32 3.3v power. Also, if it is connected to an Arduino UNO, MEGA, or NANO, the I2C port will be powered by the microcontroller’s 5V power.
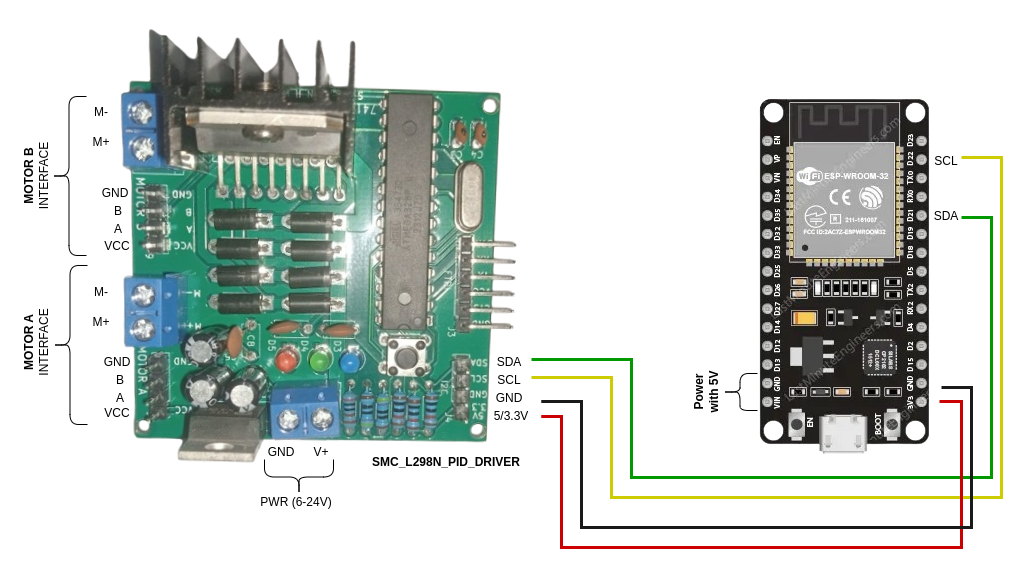
In summary, ensure you power the smc_l298n pid motor driver first from the power port while the connected Arduino-based microcontroller must power the I2C port. Don’t forget to ensure the sic_l298n and the Arduino-based microcontroller are connected to a common ground.
Once it is powered and the I2C is connected, follow the smc_l298n_i2c_lib GitHub repo on how to use the I2C library and test with the example code.